Year: 2010-
Member:
Dushyantha Jayatilake
Kenji Suzuki
Partners:
- University Hospital (Rehabilitation)
Tags:
- Cybernics
- Assistive Robotics
|
|
Robot Mask
Robot Assisted Smile Recovery and Socially Assistive Robotics
|
|
|
|
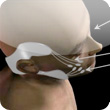
We have been developing the "robot mask" to support rehabilitation for hemi-facial paralysis. Facial expressions, which are controlled by the electrical signals sent through the facial nerve; the seventh (VII) of 12 paired cranial nerves, are produced by the actions of the facial muscles. However, due to various medical conditions, these voluntary muscle activities can sometimes degrade or even disappear, resulting in facial paralysis. Although the available medical support can speed up the healing process as temporary paralysis sometimes can last up to three to four years, it is necessary to have other means to provide immediate relief. Despite the advancement of biomedical engineering, not much effort has been made to address the facial paralysis, in terms of robotics.
Under these circumstances, we propose the development of robot mask to support expressiveness of facial paralysed patients during their rehabilitation process. The robot mask aims to improve the quality of life by providing a non-invasive wearable device to recover and enhance facial expressiveness. With the robot mask, the facial expressions are generated by pulling the facial skin through wires externally attached to the skin. The system explained in the paper mainly targets the rehabilitation process of facial paralysed patients. However, it could also be used as a cosmetic and healthcare management tool for the ageing society and a tool for expression training.
The main target of bioelectrical signal-based control is to obtain seamless control of artificially generated facial expressions and support the timing of facial message signs needed for interpersonal communication. By acquiring bioelectrical signals from the contralateral side of a hemifacial paralysed person and using them to actuate the artificial muscles of the ipsilateral side, we aim to artificially correct the baseline facial muscle tone, and to minimise the drooping of the ipsilateral face.
|
|

This work is partly supported by Grants-in-Aid for Scientific Research, MEXT, Japan.

This study was supported in part by the Global COE Program on "Cybernics: fusion of human, machine, and information systems.”
|
| |
|
|
|
Publications
- Jayatilake, D., Suzuki, K., Robot Assisted Facial Expressions with Segmented Shape Memory Alloy Actuators, International Journal of Mechatronics and Automation, 1(3/4):224-235, 2011.
- Jayatilake, D., Suzuki, K., and Kamibayashi, K., "Selective Facial Nerve Stimulation with an Array Electrode," Proc. of Biomedical Engineering, doi:10.2316/P.2011.723-134, 2011
- Jayatilake, D., Suzuki, K., "A Multiple SMA Hybrid Actuator to Generate Expressions on the Face," Proc. of 2010 IEEE Intl. Conf. on Robotics and Automation (ICRA), pp. 2203-2208, 2010
- Jayatilake, D. Takahashi, K., Suzuki, K., "An assistive mask with biorobotic control to enhance facial expressiveness," Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3568-3573, 2009.
- Jayatilake, K. and Suzuki, K., "A Soft Actuator Based Expressive Mask for Facial Paralyzed Patients," Proc. of 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2008), Nice, France, pp. 4048-4053, 2008.
- Jayatilake, K., Gruebler, A. and Suzuki, K., "An Analysis of Facial Morphology for the Robot Assisted Smile Recovery," Proc. of 2008 4th Intl. Conf. on Information and Automation for Sustainability (ICIAfS'08), Sri Lanka, 2008.
|
|
|
| |
|
|
|
Related Projects
Cybernics / Augmented Human
|
|
|
|