|
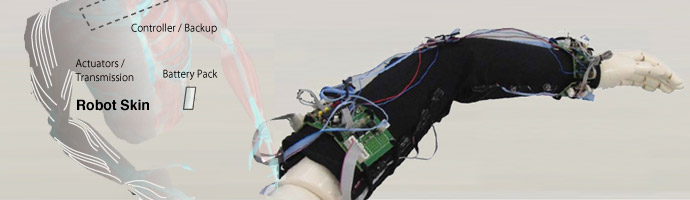
Rehabilitation is one of the most desirable fields of robotics. We have been developing a light-weight wearable robot in order to provide motion instruction for the upper limb. The developed robotic system differs from conventional exoskeleton robots because it does not aim to give power assistance but focuses rather on motion instruction with minimal actuation by using a collection of shape memory alloys. Further, the structure is based on tight-fitting sportswear and is flexible so as to be comfortably worn by the user. Because wearability is one of the most important issues, we introduce a wearable robot based on ordinary clothes, which is easy to wear it and does not affect the subject’s mental condition. We used an array of shape memory alloy springs and tactile motors as light-weight actuators. We then conducted preliminarily experiments using these two robots with healthy subjects. The developed robots are capable of guiding a subject's arm and hand in a desired direction in a desktop environment.
We have been developing a light-weight wearable robot. There are three advantages to a soft and light-weight wearable robot that can be worn like ordinary clothes. One is wearability, in other words, ease to wear. Conventional rehabilitation robots have a rigid metal structure. This structure, therefore, takes time to put on and negates a quick start for rehabilitation. A second advantage lies in it being an external system. A structure that is too mechanical can possibly affect the subject feelings. To avoid this problem the exterior of the robot is also important. In this matter, the ideal appearance is that of daily use clothes. The last point is portability. This light weight design provides also freedom from a fixed environment.
To achieve a light wearable robot we investigated the task in a desktop environment. At this point we decided to treat the human upper limb since arm functions are one of the most useful for daily life. Especially the desktop environment has been well studied regarding human motor functions. In addition to realizing a light wearable robot, we also focused on the actuator matter. Conventional wearable robots are normally introduced using geared motors or an air compressor with cylinder. Even though those actuators are too heavy to wear and are noisy. At this point we have been trying to develop familiar and portable wearable robots therefore it is required that the actuators be light and silent enough to wear.
|
|

This study was supported in part by the Global COE Program on "Cybernics: fusion of human, machine, and information systems.”
|
|
Publications
- Yano, S., Suzuki, K., "Development of an Anatomical-based Wearable Robot for Motion Instructions to the Upper Limb," Proc. of International Symposium on Robotics and Intelligent Sensors (IRIS2010), TS1A-4, 2010.
|
|
|