|
Year: 2009-
Member:
Hideki Kadone
Keisuke Takahashi
Modar Hassan
Kenji Suzuki
Partners:
Yoshiyuki Sankai
(U. Tsukuba)
College de France
(France)
Tags:
- Cybernics
- Augmented Human
|
|
Cognitively Assisted Locomotion
Lower-limb exoskeleton control based on head and gaze motor behavior
|
|
|
|
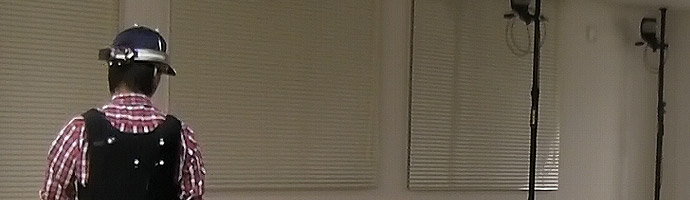
We propose a novel wearable sensor device for the measurement of the head orientation and relative position against the body trunk in real-time. It is known that in natural walking, human locomotion is preceded by changes in head orientation and the walking direction can therefore be predicted by observing the head orientation.
We have been developing a wearable sensing device for the measurement of head orientation, which enables prediction of the future walking direction in real-time for the assistive technologies for locomotion - such as exoskeleton robots and wheelchair. However, existing body posture measurement devices tend to be large and non-portable such as 3D motion capture system (VICON, Motion Analaysis), therefore measurement in everyday space is still difficult. On the other hand, the developed system enables wireless and location independent measuring of the orientation of the head and it can be applied for assisted locomotion.
In evaluating the accuracy of the developed device, we observed the head anticipation during natural walking. Additionally, we compared the head anticipation in natural walking and electric wheelchair locomotion using the developed device and discuss a novel wheelchair control based on head orientation.
We evaluated the measurement accuracy of the developed device by the motion capture system. We obtained the head anticipation latency to walk/locomotion direction in natural walking and wheelchair locomotion with the developed device and the latency was 687 [ms] in walking and 694 [ms] on wheelchair locomotion, therefore it seems to be possible to use the developed device for walking/wheelchair locomotion direction prediction.
|
|

This work is partly supported by FIRST Program: World leading Human-Assistive Technology.

This is a collaboration work with College de France, Paris
|
| |
|
|
|
Publications
- Suzuki, K., Kadone, H., and Gruebler, A., "Kinematic and Physiological Cues for Human System Interaction," Proc. of 4th International Conference on Human System Interactions, pp. 415 - 418, 2011.
- Takahashi, K., Kadone, H. and Suzuki, K., "Head orientation sensing by a wearable device for assisted locomotion," Proc. of ACM Augmented Human International Conference, doi:10.1145/1959826, 2011.
|
|
|
| |
|
|
|
Related Projects
Cybernics / Augmented Human
|
|
|
|