|
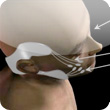
We propose a novel method to support learning of grasping behavior with a myoelectric hand through the use of force-feedback. A force transfer mechanism is implemented in the developed prosthetic hand, which creates a force stimulus that is synchronized with opening and closing of the gripper. For a person with congenital forearm defects, learning how to operate a myoelectric prosthetic hand is quite difficult. The force-feedback is presented at the end of the forearm of the affected side to assist the process of creating a body image. Several experiments were conducted to confirm the ability to generate real-time feedback with the developed hand. An extensive study was carried out on a subject with a congenital forearm defect, and the ability to perceive the stimulus of pressing force applied at the end of the forearm of the affected side was confirmed.
From the evaluation experiments with healthy subjects, we confirmed that the developed hand can be operated voluntarily through the use of bioelectric signals. We also confirmed the efficacy of the developed force-feedback system and that the force-feedback is not delayed relative to the opening and closing of the gripper. Users were also able to recognize grasping with the gripper through a change in rate of pressure change.
In addition, we conducted a user study in a subject with a congenital forearm defect and received positive feedback on the developed prosthetic hand. From this preliminary study, we confirmed that the subject could perceive the force-feedback. In the near future, we will continue further studies to evaluate the effectiveness of the proposed system in learning to control a myoelectric prosthetic hand.
|
|

This work is partly supported by FIRST Program: World leading Human-Assistive Technology.
|
|
Publications
- Akimichi, N., Eguchi, K., and Suzuki, K., "A Myoelectric Controlled Prosthetic Hand with a Continuous Force Feedback Mechanism," Proc. of IEEE International Conference on System, Man and Cybernetics, pp. 3354-3359, 2013.
|
|
|