人が機械を利用して運動学習する一つの例として,筋電義手があげられます.その中でも特に先天性前腕欠損児は欠損側上肢のボディイメージを形成するため,成長に伴い装飾義手,筋電義手使用の訓練を段階的に行なっていくべきだと考えられています.小児用筋電義手は,Ottobock 社の筋電電動ハンドが広く用いられており,手先を操作するためには対になる2 極の筋活動を随意的に制御する必要があります.
体性感覚は運動学習において重要な感覚であることは知られており,認知運動療法などでも体性感覚の重要性が述べれられています.これより,電気刺激等を用いた刺激や単純な刺激の有無による感覚フィードバックではなく,把持感覚とモダリティが異なる運動覚のように体性感覚を刺激する力覚を介し,義手の動作に伴った時間的整合性の高い感覚提示により運動学習を促進することを目指します.
そこで本研究では,適切な感覚フィードバックによる運動学習の促進効果を検証するため,筋電義手の動作に伴い体性感覚を刺激する力覚フィードバックを装着者に提示可能とする新たな筋電制御ハンドの開発を目的としています.また提案する力覚提示法は,コントローラを介さず機械的な伝達機構のみで構築することで,空間的・時間的に整合性の高い感覚フィードバックの実現を目指すものです.
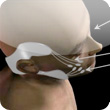
人が筋肉を動作させる際に発生する生体電位信号を皮膚上で非侵襲で計測することにより,人の運動意思に基づきハンドの開閉動作を行います.ここでは前腕の橈側手根屈筋と長橈側手根伸筋からの表面筋電位信号によりハンドの開閉を制御します.更に,手先の開閉動作に伴い,コントローラを介さず機械的な伝達機構のみにより直動方向の作用に変換し,シャフトを通じて手先に近い断端部の皮膚上への押し付け刺激を行うことににより,ハンド動作から遅延のない時間的・空間的に整合性の高いフィードバックを実現します.これにより,ハビリテーションやリハビリテーションの現場での運動学習支援への応用を目指します.
年度: 2012-
メンバー:
秋道 奈々緒
鈴木 健嗣
共同研究:
筑波大学附属病院
(リハビリテーション)
Tags:
- サイバニクス・拡張生体技術
![]()
本研究の一部は,最先端研究開発支援プログラムの支援により行われています.
![]()