
近年,自律分散・創発・自己組織化というキーワードのもと,自然界で見られるような多数の要素から秩序が生まれる現象を参考とした新しいロボティクスの研究が進められている.この手法の利点は,従来と比較して頑健性・信頼性・拡張性において優れていることが挙げられる.本研究では,環境の変化に適応した自己組立機構を実現することを目的とし,エネルギー伝播機構を有するモジュールから構成される自己組立システムを提案しています.このモジュールは3種のエネルギーからなる入出力の組み合わせによって動作し,入力に応じて4つの状態をとり,各状態に応じて他のモジュールに対して分離・結合する動作とともに,エネルギーの出力を行う.ここでは,具体的な所望の動作として走光性の実現を目指します.
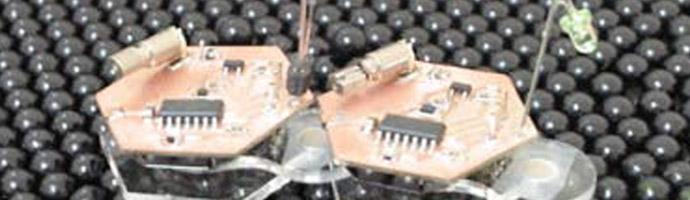
シミュレーションの結果より,モジュールを個別に制御することなく,環境からの入力を制御することにより,単体のモジュールでは実現できない走光性をもったクラスタの自己組立が実現可能であることを明らかにしました.結果より,自身のモジュールから出力された一部のエネルギーが,他のモジュールを介して正のフィードバックとなるとき,自己組立が行われるメカニズムを明らかにしています.これより,走光性を持ったクラスタは,正負のフィードバックを切り替えながら光の追従を実現すると予想されます.また,システムは環境からの入力に応じて自己組立を変化させることから,形態的・機能的に環境の変化に適応した自己組立が実現可能なモデルであるといえます.さらに,各機能をLED・光センサ・振動モータで模擬した実機モジュールを作製した.実機実験より,同様のモデルにより自己組立が可能であることを明らかにし,実世界での実現性を示しています.
本研究を通じて,エネルギー伝搬機構を考慮したモジュールからなり,環境からの入力に応じて異なる挙動を示す新しいる自己組立システムの実現性を示した.これらをシミュレーションと実機実験によりその特性を明らかにするとともに,理論的な考察に関する新たな知見が得られた.これにより,自律分散的に動作するモジュールを環境からの入力基づき制御が可能である新しいモジュール型ロボットの実現が期待出来ます.
年度: 2014-
メンバー:
栗原 孝平
鈴木 健嗣
共同研究:
Tags:
- 次世代知能化技術
|
|
|
|
 ブレイン・マシン・インタフェース
ブレイン・マシン・インタフェース
 情報の視覚化と情報の体験拡張技術
情報の視覚化と情報の体験拡張技術
 ロボティクス要素技術
ロボティクス要素技術
![]()

 3次元表情解析システム
3次元表情解析システム ディジタル・フェイス・プロジェクト
ディジタル・フェイス・プロジェクト 聴覚と触力覚を通じた複合現実感技術
聴覚と触力覚を通じた複合現実感技術 人間機械協調系による遠隔ロボット制御
人間機械協調系による遠隔ロボット制御 サバイバルロボット
サバイバルロボット 自律的エネルギー管理技術
自律的エネルギー管理技術