
近年, 世界中で人間の能力を強化する外骨格の開発が盛んに行われています.国内外で,介護や運搬作業などの負担軽減や不自由な体の機能の補助などを目的として作られた外骨格ロボットの研究が行われています.しかしながらこれらの外骨格ロボットは, いずれも人間の骨格にかかる負荷を肩代わりすることで歩行における積載能力や航続距離の向上を実現するものであり, 移動可能な環境の拡大には至っていません.
そこで, 本研究では人間の跳躍に注目し, 跳躍により三次元的な移動能力を向上させる外骨格の開発を目指しています. 瓦礫などの障害物を自在に飛び越え,建物や崖に跳び乗ったり跳び下りたりといった三次元的な移動が可能となれば,通常の身体能力では侵入できないような高低差の激しい環境での移動が飛躍的に進歩し, 人間の移動可能な環境の拡大に繋がると考えられます.
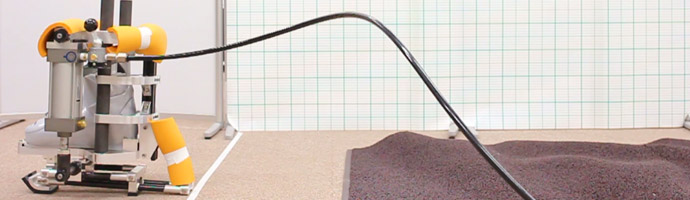
本研究では,足の固定具としてのブーツに装置を備え,制御には空圧アクチュエータを用いています.空圧アクチュエータは出力が大きく,弾性を持つため外力に強く,タンクに圧縮空気を蓄積しておくことで携行も可能です.以上の理由から,今回はエアータンクに圧縮空気を蓄えてエアシリンダを作動させることとしています.
これまでに,三次元的な移動能力を向上させる下肢装着型外骨格を開発するため, 跳躍機構の設計及び試作を行っており,試作した装置を用いて装置が実際に跳躍可能であることを示しています. また, 弁と配管長さの変更により, 跳躍性能が向上する可能性があることを示しています.
年度: 2014-
メンバー:
野宮 孝平
鈴木 健嗣
共同研究:
Tags:
- 次世代知能化技術
![]()
本研究の一部は,文部科学省科学研究費補助金の支援を受けて行われております.
|
|
|
|
|
 ブレイン・マシン・インタフェース
ブレイン・マシン・インタフェース
 情報の視覚化と情報の体験拡張技術
情報の視覚化と情報の体験拡張技術
 ロボティクス要素技術
ロボティクス要素技術
![]()
 3次元表情解析システム
3次元表情解析システム ディジタル・フェイス・プロジェクト
ディジタル・フェイス・プロジェクト 聴覚と触力覚を通じた複合現実感技術
聴覚と触力覚を通じた複合現実感技術 自己修復モジュールに関する基礎研究
自己修復モジュールに関する基礎研究 人間機械協調系による遠隔ロボット制御
人間機械協調系による遠隔ロボット制御 サバイバルロボット
サバイバルロボット 自律的エネルギー管理技術
自律的エネルギー管理技術