
本研究では、上肢腕動作を教示するための新しい軽量着用型ロボットを提案するものです.解剖学的知見に基づき腕に水平方向・垂直方向からの刺激に対する知覚強度を検証するとともに、形状記憶合金バネ、振動モータを用いた複数のロボットを設計・製作し、実機によりその特性について評価実験を行って来ました.さらに、リハビリテーション応用を念頭に置いた1次元の動作教示を行い、提案手法の有効性を明らかにしています.
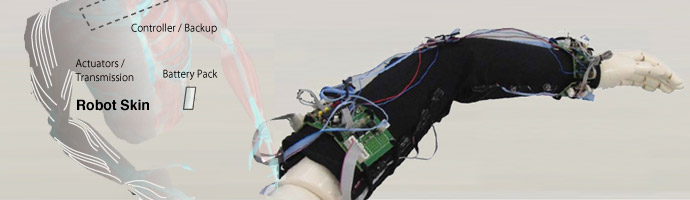
我々は、上肢向け動作教示用「ロボットスキン」の開発を行っています.これは自由な行動範囲と高い自由度、着脱のしやすさを達成するための着用型機器です.小型軽量かつ無音のアクチュエータとして,形状記憶合金バネを応用しています.また,適切な動作教示方法を検討するため,まず上肢の運動メカニズムを解剖学的知見により検証を行いました.
肘関節の屈曲・伸展の教示では,被験者に意図した方向を指示することが可能であるとともに,手の把持動作の教示では,親指を含めた把持動作を提案手法により教示することが出来ています.
年度: 2007-10
メンバー:
矢野 翔
鈴木 健嗣
共同研究:
Tags:
- サイバニクス・拡張生体技術
![]()