本研究では、実環境において体幹に対する頭部の姿勢、および相対位置を計測するための装着型センサデバイスの開発とそれを利用した歩行分析、および歩行補助装置への応用を目的としています。
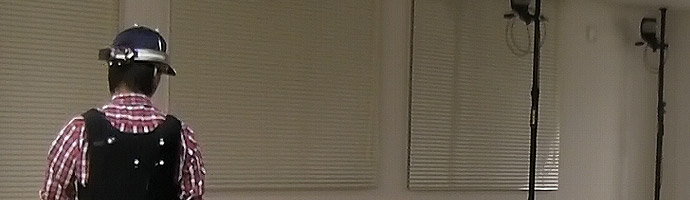
歩行に代表される複雑な全身動作においては、実際に歩容を生成する下肢動作に加え、視線や頭部姿勢といった認知的役割をなす部位の運動もまた重要である。このため、全身の身体動作を計測する様々な手法が提案されているが、既存の身体計測装置は大型で可搬性が低く、携帯が不可能なものが多いため、歩行補助に応用可能な身体計測は依然として困難である。そこで歩行時における頭部予備動作の解析に基づき、実時間で進行方向の予測を行い、外骨格型の歩行支援装置や電動車椅子等の歩行補助器具の操作に応用可能な装着型センサデバイスの開発を進めています。
人は自然な歩行時において能動的に進行方向を変更する際、まず将来の進行方向に向け視線を回転し、続いて頭部、体幹、腰と順に回転することで、進行方向を変化させることが知られています。また、歩行の予備動作と位置づけられるこの一連の回転動作を開始する時刻は歩行の進行方向が変化する時刻よりも、変化が生じる空間的な位置に依存することも知られています。これらの人間の歩行時の生理学的特性を利用することで、自然な歩行動作の観測から対象者の運動意志の推定を行い、既存の歩行支援機器に対し歩行補助の切り替えの合図を与えることが可能となります。
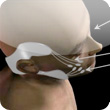
ここでは、対象とする頭部姿勢のモデル化を行い、光学式センサと慣性センサの組み合わせによる頭部装着型センサデバイスの開発について述べる。開発したセンサの性能評価に加え、電動車椅子による移動や歩行支援へ応用可能であることを示す。このように使用者が能動的に進行方向の変化を指示する必要のある歩行補助装置に対し本技術を応用することにより、ジョイスティックなどの操作に加え、人の運動意志をとらえる新たな手法を提供することが可能になる。これにより人が本来有する生理学的特性を活かした歩行支援の実現可能性を示しました。
年度: 2010-
メンバー:
Modar Hassan
門根 秀樹
鈴木 健嗣
共同研究:
山海 嘉之 (筑波大学)
College de France
(仏)
Tags:
- Cybernics
- Augmented Human
![]()
本研究の一部は,最先端研究開発支援プログラムの支援により行われています.
![]()
本研究は,仏カレッジ・ド・フランスとの共同研究です.
![]()