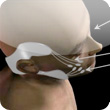
*写真は定形発達児のセッションを代諾者の許可を得て掲載
我々は,自閉症スペクトラム障害を持つ児童のための,情動を考慮した新しいロボット介在活動の枠組みを提案しています.特に,ASD 児への親和性の高い機械的な特徴と, 人と似通った身体性と社会性を備えたヒューマノイドロボットは,ASD 児の社会性向上とコミュニケーション能力の促進を目的としたRAA において重要な役割を果たすことが期待されています. 提案手法は, ロボットを介在させた保護者・療育者との自然でかつ連続的なインタラクションを通じてASD 児の快情動を生起させることで, 自発的な社会的行動を促すことを目的とする,動物介在活動(Animal-Assisted Activity, AAA) に着想を得たロボット介在活動の枠組みです.
ここでは,参加者主体での自然な社会的交流に基づくロボット介在活動を実現するための,療法士や療育者でも利用可能なインタフェースを利用したロボット操作インタフェースの開発について述べるとともに,介在活動中における対面行動や表情表出を定量的に計測するための手法について研究を行っています.また,予備実験により開発した表情および対面状況の計測手法の有効性を検証するとともに,笑顔と対面状況との関係について得られた知見に基づき,ASD 児の療育における情動と社会的行動の計測の重要性について考察しています.
ここでは,療育者や保護者のための直観的なロボットの行動制御手法,表情筋活動から笑顔を検出する装着型デバイス,客観的な行動指標を計測するシステムを開発し,長期間に渡る実証実験を通じ,自閉症児とロボットのインタラクションに関する行動学習支援の可能性を明らかにしています.
年度: 2012-
メンバー:
廣川 暢一
舟橋 厚
鈴木 健嗣
共同研究:
発達障害研究所
Tags:
- サイバニクス・拡張生体技術
- 社会的相互作用研究
![]()