日本では10 万人以上が脊髄損傷により不自由な日常生活を強いられています.損傷部位別では,完全損傷の場合に四肢麻痺となる頚髄損傷が75%,下肢麻痺となる胸腰仙髄損傷が24.7%を占めています.受傷原因の4 割が交通事故によるもので,年齢別では20代と50 代での受傷が目立ちます.若くして脊髄を損傷し就職・復職を果たす者も少なくないが,社会生活に必要不可欠である移動機能を補う手段として,現状では車椅子の利用以外に十分な選択肢が用意されているとは言えません.
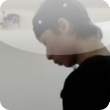
車椅子の利用時には,常に座位姿勢からの視点となり,立位姿勢の視点を前提として整備された社会環境においては生活が不便になります.他の健常者らとコミュニケーションを図る場面にあっても,視点や上体高の違いから,歩きながらの会話や身振り手振りを交えた会話をする際の障害となっています.一方,車椅子での移動に際しては,その操作が少なくとも片手を占有するため,歩行移動のように両手を自由に使うことができません.
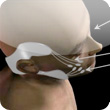
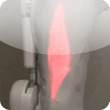
そこで本研究では,下肢機能の支援により大幅な自立性の向上が見込めるとの観点から,上肢上体が自由に動く下肢障碍者に対し,日常的な社会生活を支援する高い移動性能を有した新しいパーソナル・モビリティを提案します.ここでは,車輪駆動の移動機構を有する受動型外骨格装着機器による,乗員の姿勢遷移・維持の支援,及び立位姿勢を維持したまま移動を可能にする機器の開発を目指します.
これまで,日常生活における基本的な動作である立位,座位間の姿勢遷移および立位姿勢の維持を支援し,乗員の胴体姿勢を読み取る受動型外骨格機構と,胴体姿勢に基づき制御される電動車輪からなり立位移動を可能とする新しい移動支援機器を提案し,試作することでその実現可能性を示しています.開発した機器を使用することにより特別に訓練せずに起立着席動作が可能であること,外骨格からの支持により立位姿勢維持のために乗員の脚負担がないこと,そして立位姿勢において胴体姿勢に基づいた移動制御が可能であることを実証してきました.現在,脊髄損傷者とともに適応的姿勢可変・立位移動型パーソナルモビリティの実証にむけて研究を行っております.
年度: 2012-
メンバー:
江口 洋丞
門根 秀樹
佐々木 海
清水 如代
Chen Yang
Diego Paez
鈴木 健嗣
共同研究:
筑波大学附属病院
(リハビリテーション部)
筑波大学附属桐ヶ丘特別支援学校
Tags:
- サイバニクス・拡張生体技術
![]()
本研究の一部は,文部科学省科学研究費補助金の支援を受けて行われております.
![]()
本研究の一部は,最先端研究開発支援プログラムの支援により行われています.
![]()