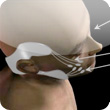
本研究では,ロボットが教示者から生体信号に基づく情動的なフィードバックを受け取るとともに,それに基づき学習をする新しい人ーロボットのインタラクションの実現を目的としています.顔面の筋電信号に基づき実時間で笑顔・怒り顔等が識別出来る装着型デバイスを用いることで,ロボットが目的とする動作を獲得出来るようにコーチされるという新しい学習手法です.これは子どもが親から物事を学ぶように,激励と叱責に基づく学習であり,これによりロボットが異なる状況下において迅速に適切な行動を学習出来ることを示しました.装着型デバイスによる表情識別では,異なる光源下やカメラアングルに影響されず,継続的にかつ人に認知負荷をかけない状態で情動的なフィードバックを得ることが可能です.本手法は,認知ロボティクス・社会ロボティクスの分野における応用を想定しており,人とロボットが継続的にかつ非言語的な社会的なやり取りに基づきインタラクションする場面で大きな役割を果たします.
将来,ロボットが人間の環境に徐々に統合されていくようになると,複雑で異なる状況下においてもロボットは正しく動作して人間と自然に対話する能力が必要となります.これまでの研究では,単純な人間からの指令やフィードバックから,適切な動作を実行するために学ぶことができるロボットは報告されているが,いずれも限定的なフィードバックであった.このような学習のための適切なモデルは、子供が親から学ぶといった仕組みが自然であると考えています.
タスクを実行する方法を明示的に伝えるのではなく,子どもたちは自身で環境内を探索し,さまざまなアクションを実行します.最初は子どもたちは自分たちの行動に対する分別がありませんが,両親が特定の状況で激励や叱責を与えることで,子どもたちは目標を実現するための良い・悪い行動を学んでいきます.親からの賞賛や激励に応じて,子どもたちは再び同じアクションを実行するのです。このような単純な正と負のフィードバックモデルにより、ロボットをコーチするという枠組みです。
子どもたちが親の顔の表情などの感情を手がかりとして,特定の状況に適した行動を学習するのと同じ方法で,ロボットは与えられた状況に対して行動の適切な行動を実現するため,教示者の顔の表情を用いて人間がロボットを指導することを可能にしています.
年度: 2010-
メンバー:
Anna Gruebler
Vincent Berenz
廣川 暢一
鈴木 健嗣
共同研究:
NASA JPL (米国)
Tags:
- Cognitive Robotics
- Cybernics
- Augmented Human
|
|
![]()